





YORC Robots
YORC has experience designing robots with both linear and rotary motion stages. We can provide you with a custom solution optimized for your needs, such as a custom SCARA arm.

Cartesian Robots
While linear actuators are great when you need to move in straight lines, in the real world, that's rarely the case.
Two axes
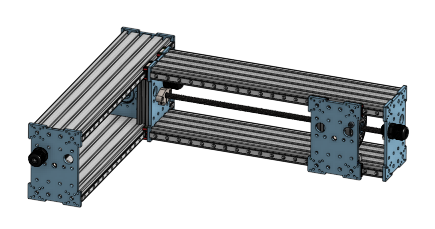
Most applications require at least two axes of motion. By connecting two YORC linear actuators together, we can create an XY stage, also known as a cartesian robot. For any application that requires movement on a flat plane, two axis cartesian robots offer a simple solution. For example imagine applying a bead of glue to a flat part. A two axis cartesian robot provides the perfect motion platform to get the job done.
Three axes
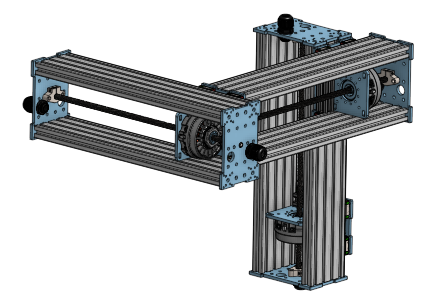
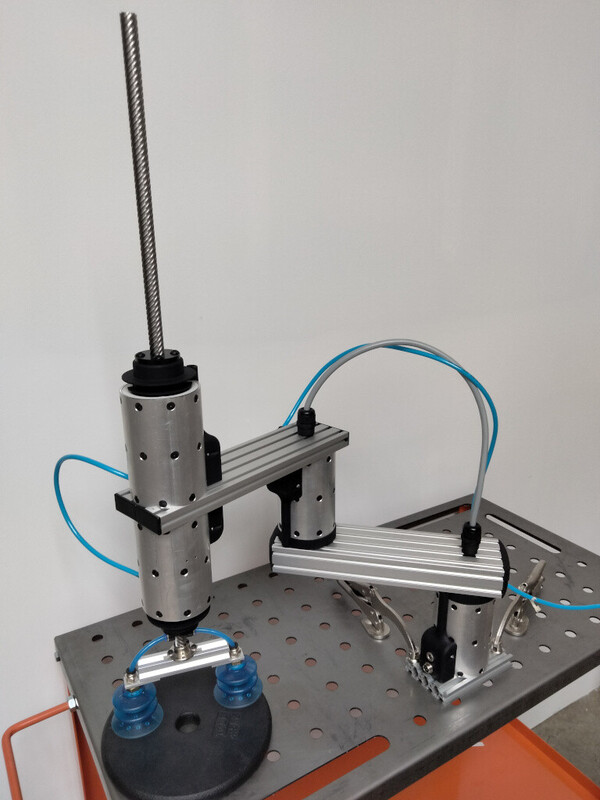
Of course, sometimes three axes are needed to move in three dimensional space. In those cases, three YORC linear actuators can be connected together. Extending that gluing example, the three axis cartesian robot would be great for applying glue to objects with varying heights.
Because of the strong and rigid design of the linear actuators, significant cantilevering (overhanging) of the load is possible while still retaining high accuracy. That means the second and third axes can move reasonably far away from the first axis. The non-cantilevered axis - the one that the others move along - may be up to 2000 mm long. The length of other axes is dependant on operational requirements.
Customizations

For vertical applications, a constant force spring may be used to increase load capacity.
Leadscrews may be selected to be either backdrivable or non-backdrivable, depending on operational requirements.
Custom bolt patterns may be designed to fit your particular application.
Please get in touch to discuss your unique needs. We'd love to chat with you!
Rotary Motion
Beyond linear motion, the YORC Rotary Joint allows for a variety of robotic designs. For example, our SCARA robot design uses rotary joints for the shoulder and elbow, and links together two rotary joints to provide linear motion and rotation simultaneously for the final stage. We can customize this and other robotic designs with motor variants, gear reducers, and link lengths that are just right for you.